Physical AI 这是老黄喊出的 Web2 AI 赛道的下半场,对于 Web3 AI +Crypto 赛道诸如 DePIN、DeAI、DeData 等板块又何尝不是?
撰文:Haotian
在达沃斯论坛上,黄仁勋到底说了什么?
表面看,他在推销机器人,实际上,他其实在进行一场大胆的『自我革命』。他用一席话终结了「堆显卡」的旧时代,却意外地给 Crypto 赛道预设了一个千载难逢的入场券?
昨天,在达沃斯论坛上,老黄指出 AI 应用层正在爆发,算力需求将从「训练侧」全面转向「推理侧」和「Physical AI(物理 AI)侧」。
这就很有意思了。
英伟达作为 AI 1.0 时代「算力军备竞赛」的最大赢家,现在主动喊出「推理侧」和「Physical AI」的转向,其实传递了一个非常直白的信号:过去靠堆卡训练大模型的「大力出奇迹」时代过去了,以后 AI 竞争会围绕应用场景落地的「应用为王」来角逐。
换句话说,Physical AI 是 Generative AI 的下半程。
因为 LLM 已经读完了人类几十年在互联网上沉淀的所有数据,但它依然不懂如何像人一样拧开一个瓶盖。Physical AI 就是要解决 AI 智力之外的「知行合一」问题。
因为,物理 AI 不可能依赖远端云服务器的「长反射弧」,逻辑很简单,让 ChatGPT 生成文字慢一秒你只是会觉得卡,可一个双足机器人如果因为网络延迟慢了一秒,它可能就会从楼梯上摔下去。
不过,Physical AI 看似是生成式 AI 的延续,实则面临着完全不同的三大新课题:
1)空间智能:让 AI 拥有三维世界的理解力。

李飞飞教授曾提出,空间智能是 AI 进化的下一个北极星。机器人要动,首先得「看懂」环境。这不仅仅是识别出「这是一把椅子」,而是要理解「这把椅子在三维空间的位置、结构以及我该用多大的力气去搬动它」。
这需要的是海量的、实时的、覆盖室内室外每一个角落的 3D 环境数据;
2)虚拟训练场:让 AI 在模拟世界里试错训练。
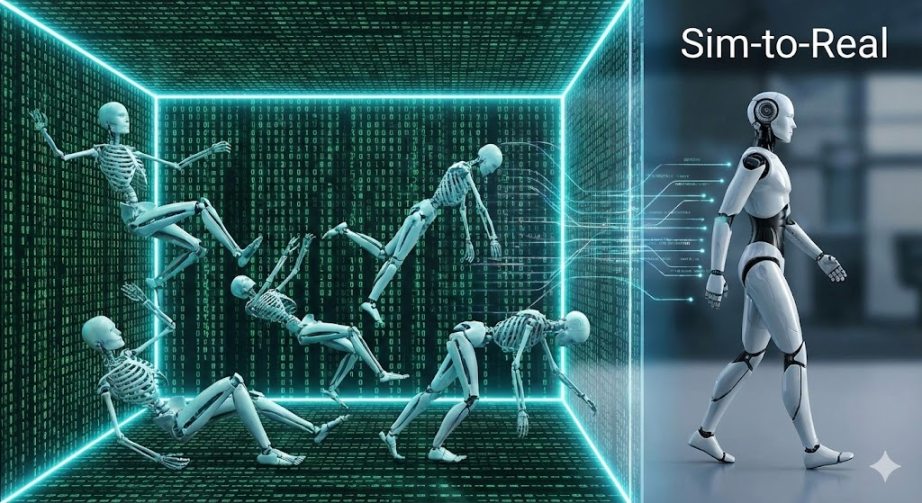
黄仁勋提到的 Omniverse 其实就是一种「虚拟训练场」。机器人在进入真实物理世界前,需要在虚拟环境里训练「摔倒一万次」才能学会走路,这个过程叫 Sim-to-Real 即从模拟到现实。如果直接让机器人在现实中试错,硬件损耗成本将会是可怕的天文数字。
这个过程,对物理引擎模拟和渲染算力的吞吐量要求,是指数级的;
3)电子皮肤:「触觉数据」一个待挖的数据金矿。
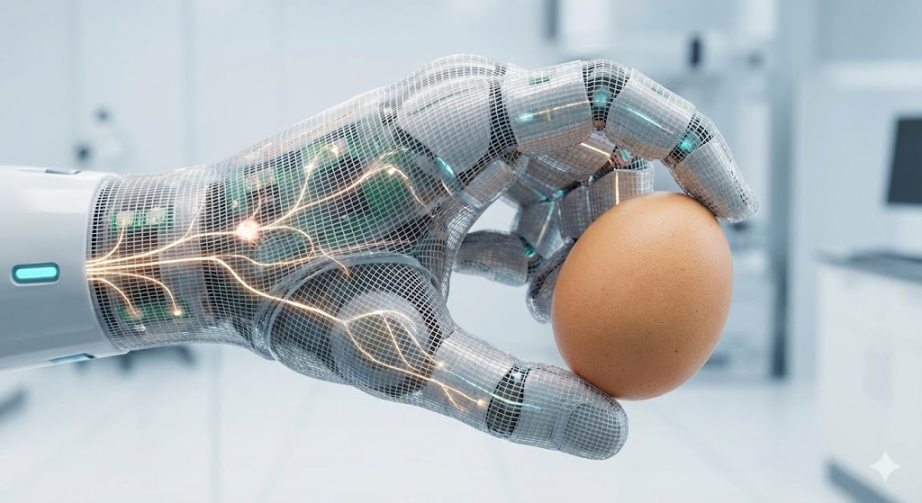
Physical AI 要想具备「手感」,需要电子皮肤来感知温度、压力、质感。这些「触觉数据」是以前从未被规模化采集过的全新资产。这可能需要大规模的传感器采集,CES 上 Ensuring 公司展示的「量产皮肤」一只密密麻麻手上就集成了 1,956 个传感器,所以才能有机器人拨鸡蛋的神奇效果。
这些「触觉数据」是以前从未被规模化采集过的全新资产。
看完这些,你一定会感觉,Physical AI 论调的出现给了很多可穿戴设备以及人形机器人等硬件设备很大的冒头机会,要知道,这些在几年前都基本被诟病为「大号玩具」的存在。
其实我想说,在 Physical AI 的全新版图里,Crypto 赛道其实也有绝佳的生态补位机会。我随便举几个例子:
1、AI 巨头们可以派街景车扫描世界的每一个主街道,但是却没法采集到街头、小区内部、地下室的犄角旮旯,而利用 DePIN 网络设备提供的 Token 激励,发动全球用户用随身设备去补齐这些数据,就有可能完成补位;
2、前边说了,机器人不能依赖云端算力,但要短期大规模的利用边缘计算和分布式渲染能力,尤其是完成很多模拟到现实的数据。利用分布式算力网络,把闲置的消费级硬件集结起来,进行分发和调度,不就可以派上用场了;
3、「触觉数据」,除了规模化的传感器应用外,一听名字就知道会极其隐私,如何调度大众把这些涉及隐私的数据共享给 AI 巨头呢,可行的路径就是让贡献数据的人能得到数据确权和分红。
总结一下:
Physical AI 这是老黄喊出的 web2 AI 赛道的下半场,对于 web3 AI +Crypto 赛道诸如 DePIN、DeAI、DeData 等板块又何尝不是?你觉得呢?
【免责声明】市场有风险,投资需谨慎。本文不构成投资建议,用户应考虑本文中的任何意见、观点或结论是否符合其特定状况。据此投资,责任自负。